Our team of engineers thanks to its multidisciplinary competences can create technological perfection which coupled with software flexibility leads to that kind of robotic excellence suitable to those who are looking for tailored solutions.
Facilities
We test each product in our laboratory with the most sophisticated engineering and IT tools.
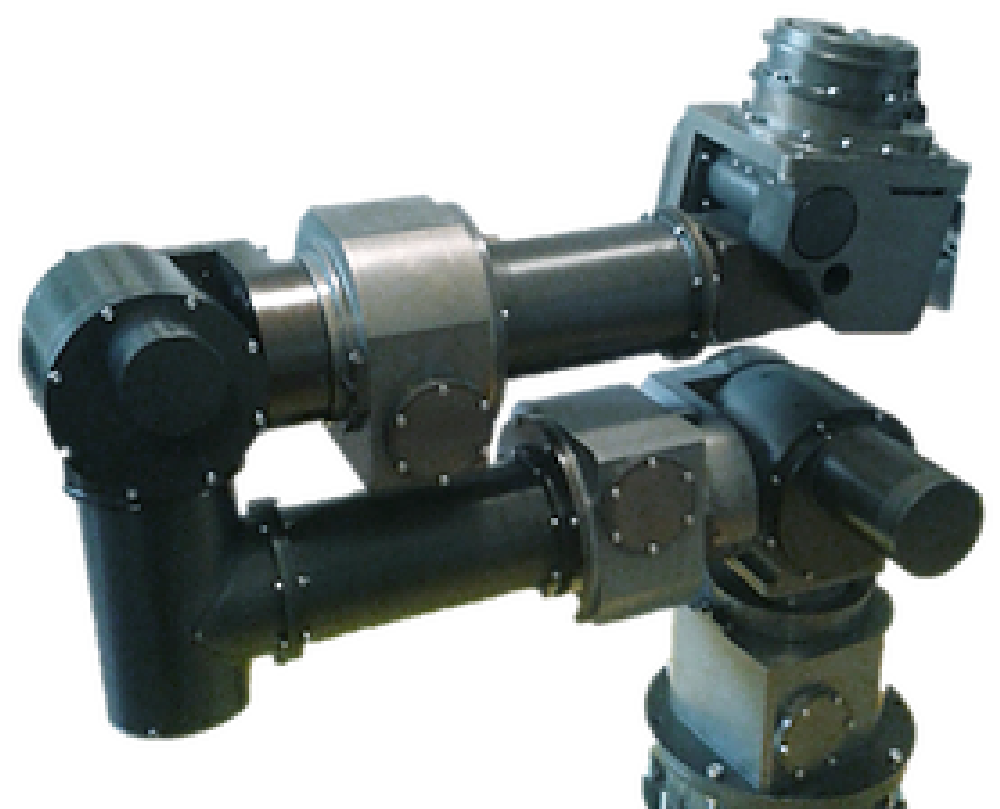
The mechatronic systems we create are versatile, innovative and modular and are used in different domains like environmental monitoring, underwater inspection and maintenance, mapping, surveillance and security, space and defence, oil and gas
Modularity
Modularity and reconfigurability are the main characteristics our robots are designed and built of. Discover all advantages of our modular approach.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.