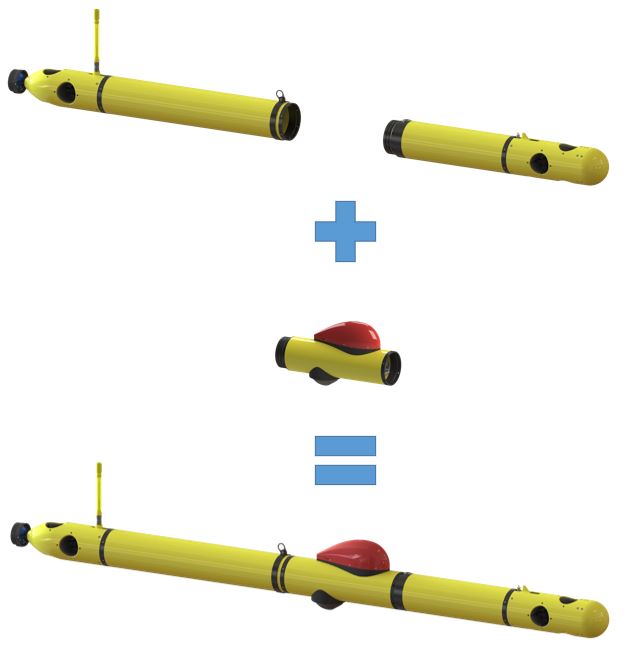
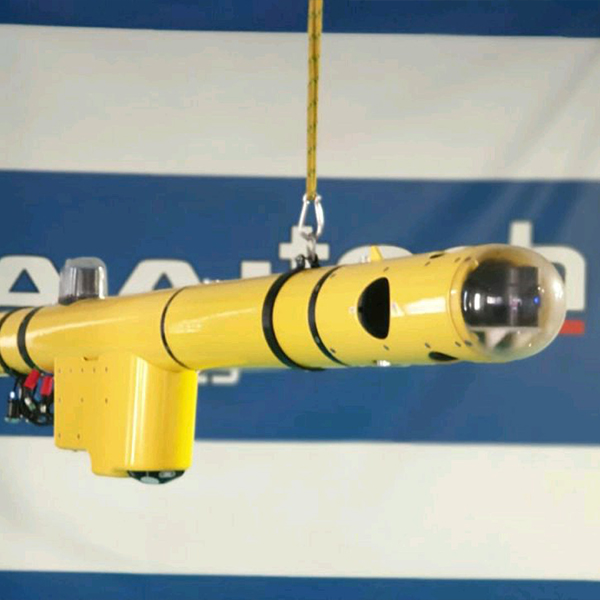
X-300 è un veicolo sottomarino autonomo a forma di siluro in grado di eseguire un’ampia gamma di missioni nel settore petrolifero, della difesa e della sicurezza, dell’oceanografia e del monitoraggio ambientale. E’ costituito da una coppia di cilindri in fibra di carbonio collegati da due sezioni sommerse dove vengono posizionati lo sterzo e il propulsore, insieme a un serbatoio che attiva il galleggiamento del veicolo stesso.
X-300 deriva dall’esperienza del Folaga e ha la stessa modularità e sistema di controllo aperto del suo “antenato”, oltre a vantare la medesima manovrabilità e capacità di gestire molteplici modalità di navigazione. Rispetto al Folaga originario, X-300 è caratterizzato da migliori performance sotto il punto di vista della velocità che è in grado di raggiungere, della resistenza e della profondità cui può essere impiegato durante le missioni operative.