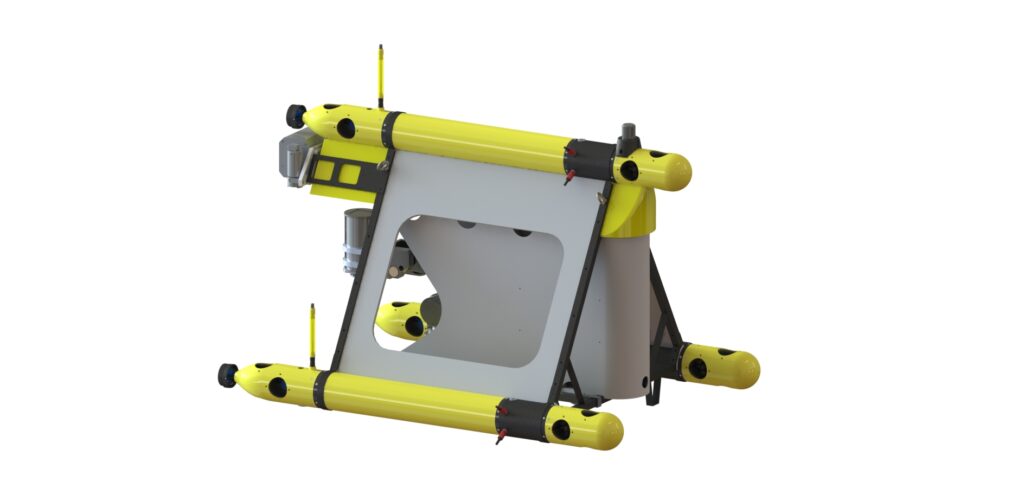
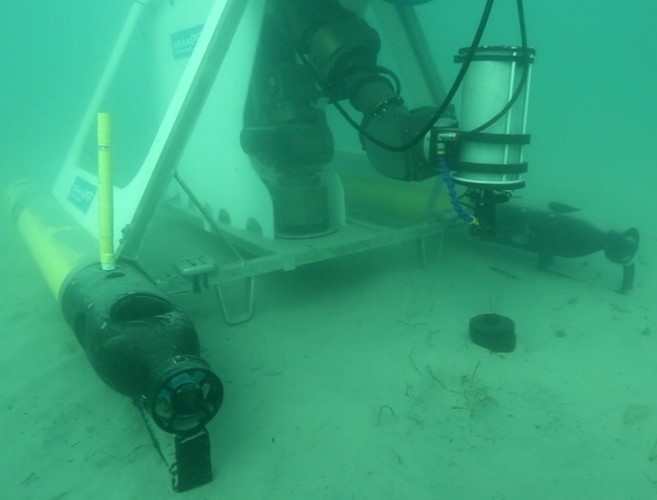
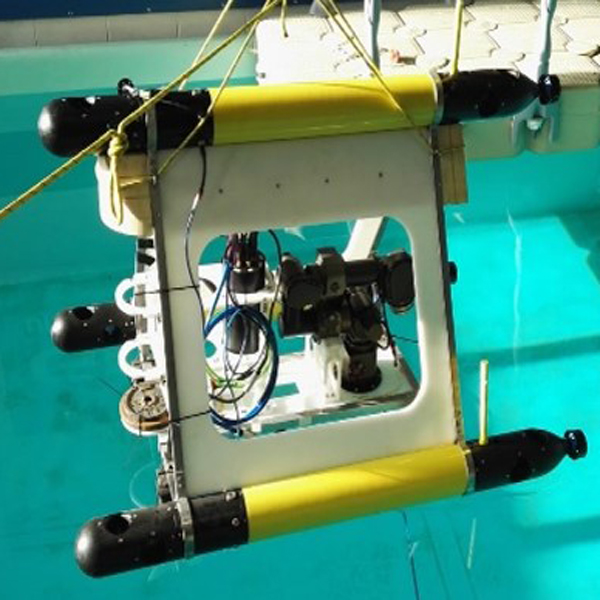
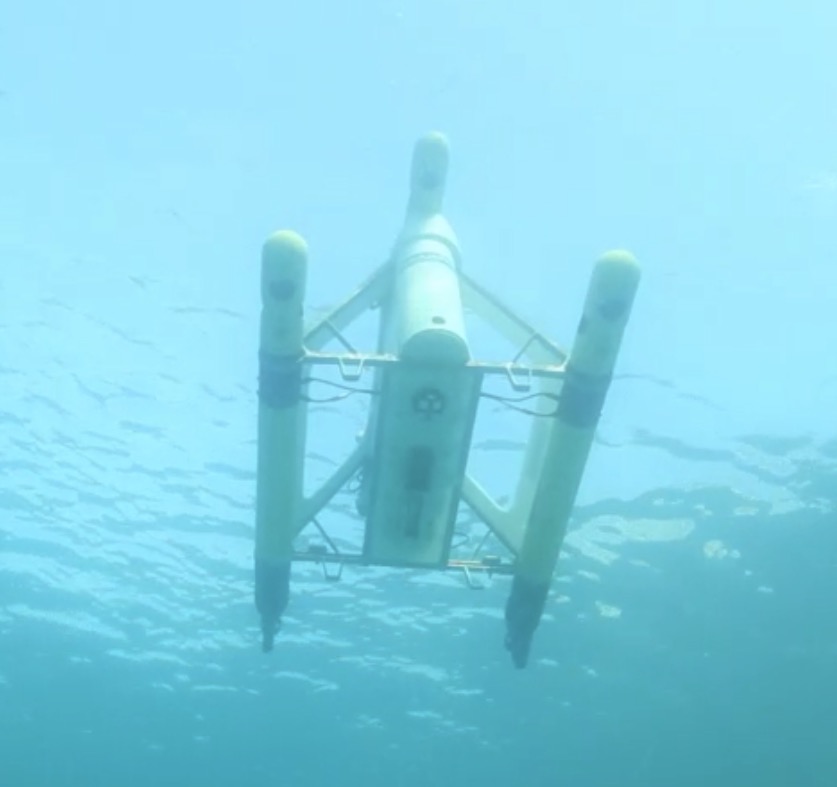
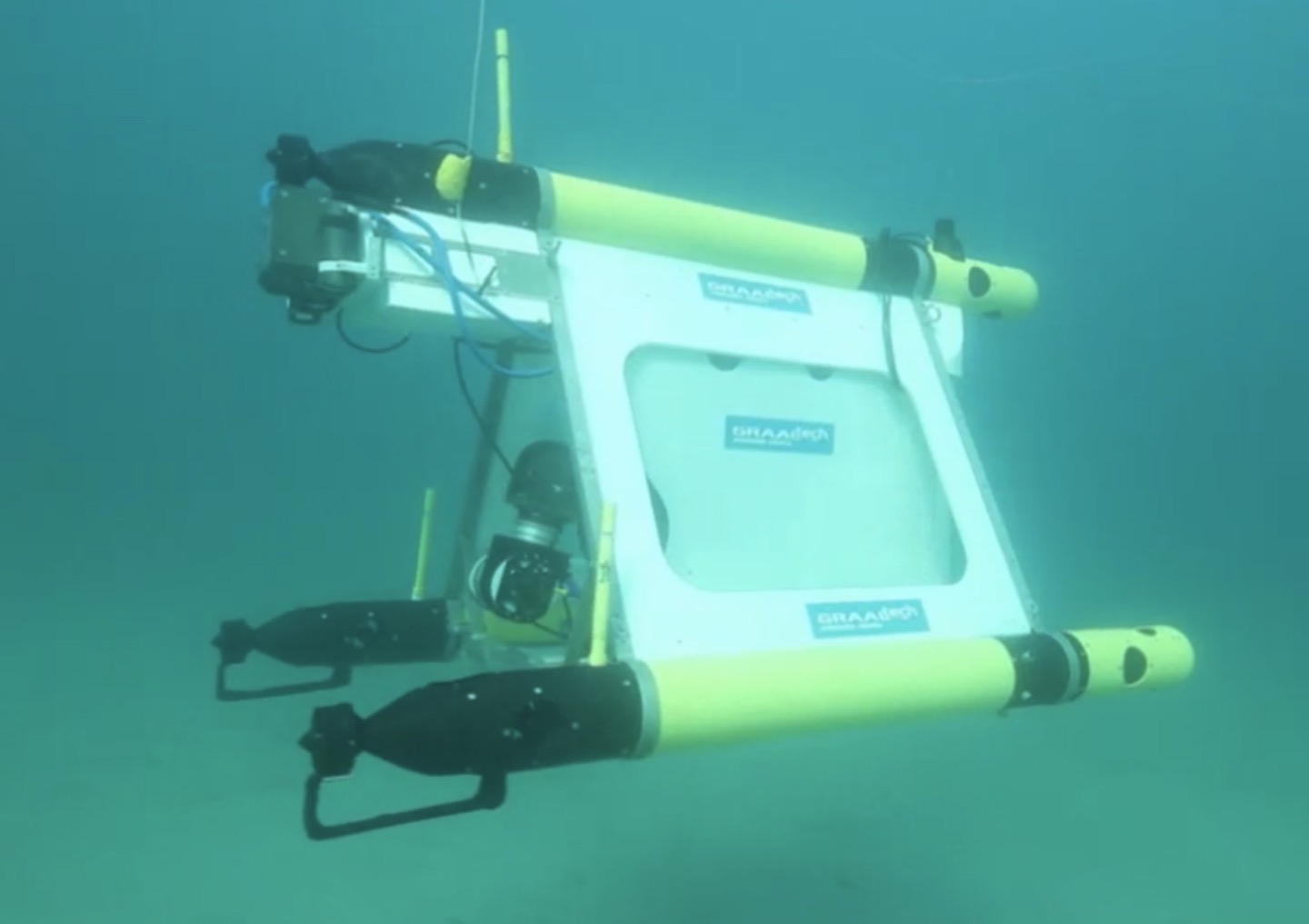
La presenza di una telaio di collegamento permette di installare a bordo del veicolo un numero considerevole di strumenti e mezzi, anche ingombranti, che altrimenti non potrebbero essere portati da un X-300 standard. Un R-300 può ospitare, per esempio, un manipolatore a 7 assi come UMA-1500 che può essere usato per missioni di recupero, attività di manutenzione o installazioni offshore. Allo stesso tempo, insieme al braccio robotico, R-300 può trasportare sensori di acquisizione come sonar e telecamere, o strumenti di navigazione come i DVL e gli IMU con le unità di processo addizionali che servono. Infine, in qualunque momento sia richiesta maggiore resistenza, si possono aggiungere al telaio ulteriori batterie.