Il mare è il migliore simulatore a nostra disposizione
Sfortunatamente, fare prove in mare è molto costoso e richiede parecchio tempo. Inoltre, non è sempre facile capire ciò che accade sott’acqua.
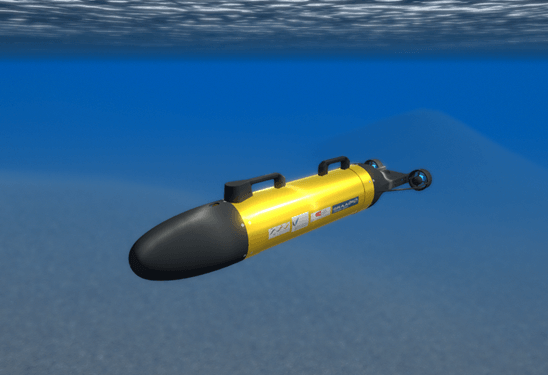
Per superare questo problema e ridurre al minimo il numero di prove in mare, utilizziamo potenti strumenti software per modellare i robot e simulare il loro comportamento in un ambiente virtuale, gestendo il tutto in home.
La nostra esperienza pluriennale nella modellazione dinamica e nella simulazione ci permette oggi di offrire ai nostri clienti un’ampia gamma di servizi completi per studiare e caratterizzare i parametri dinamici dei veicoli sottomarini senza equipaggio e verificare la performance di controllo e navigazione prima dell’uscita in mare.

Modelli idrodinamici
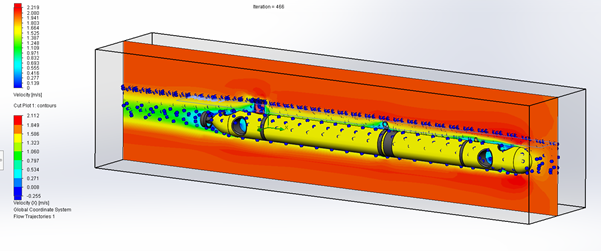
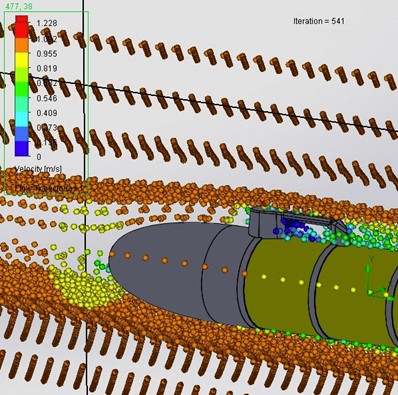
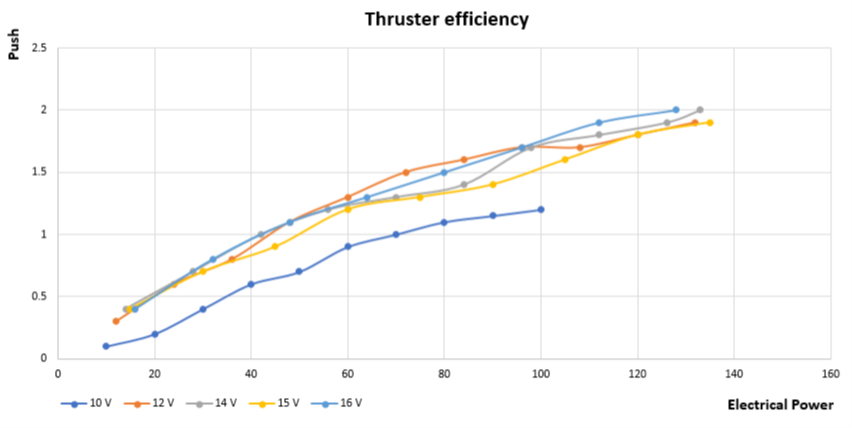
Graal Tech è in grado di supportare i clienti che necessitino del modello matematico di un veicolo sottomarino o che vogliano caratterizzare la forza di spinta dei propulsori o altri parametri idrodinamici di corpi mobili in acqua. I nostri ingegneri meccanici sono esperti nel condurre simulazioni basate sul CFD tramite moderni sistemi CAD e fornire una stima preliminare dei principali coefficienti di interesse per diversi angoli di incidenza e i relativi flussi di velocità. Le prime conferme dagli esperimenti possono poi essere ottenute con test ad hoc che vengono condotti nella nostra piscina con l’aiuto di una piattaforma sensorizzata e di un generatore di flusso che è attualmente in fase di installazione. La piattaforma è equipaggiata con un sensore di forza sottomarina a 6 assi che permette di misurare le azioni dinamiche generate dagli attuatori ad esso collegate o dai sistemi meccatronici. Quando il generatore di flusso è in funzione, abilita anche la caratterizzazione dinamica del diagramma polare della resistenza e innalza i coefficienti dei veicoli sottomarini veri e propri o di prototipi di misura più piccola.
Simulazioni dinamiche
I nostri ingeneri possono aiutare i clienti nella preparazione e nella gestione di esperimenti virtuali condotti in azienda con modelli dinamici di veicoli autonomi che si muovono in un ambiente 3D. Questo servizio è volto ai ricercatori che abbiano bisogno di validare algoritmi di guida, navigazione e controllo o che siano interessati a testare missioni complesse che necessitino della cooperazione fra molteplici veicoli che richiedano un comportamento guidato dai sensori.
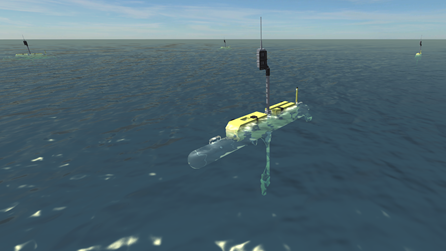
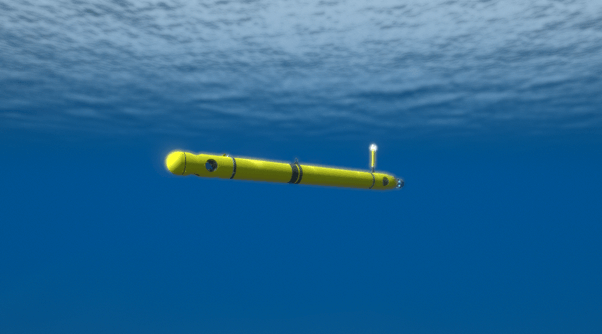
Le nostre soluzioni virtuali ci permettono di focalizzarci su determinati esperimenti di interesse, senza dover gestire tutti gli aspetti logistici delle prove in mare. L’identificazione e la soluzione dei maggiori problemi in azienda è un efficace iter metodologico che permette un concreto risparmio del budget, perché riduce i tempi di lavoro e l’impiego dello staff in mare. Il nostro ambiente sottomarino artificiale può essere popolato non solo con robot mobili ma anche con altre unità come stazioni sensoriali, strumenti di comunicazione, sistemi di localizzazione e altri oggetti di interesse customizzati. Tutti i modelli matematici alla base degli oggetti virtuali e le principali caratteristiche ambientali, possono essere migliorate con diversi livelli di accuratezza e complessità in base ai bisogni del cliente. La grafica rendering in 3D con molteplici telecamere fornisce una piena comprensione della situazione e permette di apprezzare i risultati degli esperimenti in corso.