la nostra vocazione
Creare innovazione è la nostra missione
Ricerca e Sviluppo sono le chiavi del nostro successo e il fulcro della nostra attività. La nostra attività in questo campo è duplice: da un lato sviluppiamo continuamente nuovi concetti, teorie e metodologie che portano alla creazione di prodotti innovativi. Dall’altro forniamo ai nostri clienti un supporto completo nel campo della ricerca e dello sviluppo, aiutando qualunque organizzazione che tenga all’innovazione a progettare e realizzare nuove soluzioni tecnologiche avanzate, rispondendo a specifiche domande nel campo marittimo e sottomarino.
Trasformare un’idea in una concreta opportunità di business è un processo complesso che spesso richiede il lancio di progetti di ricerca delicati. Grazie al nostro know how multidisciplinare e alla nostra lunga storia fatta di progetti nell’ambito della ricerca e sviluppo, possiamo oggi seguire il cliente in tutti gli aspetti, gestendo il rischio tecnico e riducendo tempi e costi.
I nostri ricercatori forniscono il loro supporto in tutte le fasi della produzione, dalla trasformazione dell’idea in un vero e proprio piano di ricerca attraverso l’esecuzione di compiti tecnici e attività sperimentali, fino alla prova in mare del sistema che si è andati a sviluppare.
Questo è il motivo per cui Graal Tech è un punto di riferimento nel campo della Ricerca e Sviluppo per molte organizzazioni operanti nel settore marino e sottomarino come multinazionali, istituzioni governative, centri internazionali di ricerca e accademie.
Settore petrolifero
Nell’ambito del settore petrolifero i nostri prodotti si prestano a una vasta gamma di operazioni: bracci UMA montati su veicoli R-300, possono condurre attività di manutenzione su infrastrutture sommerse, possono condurre operazioni di controllo tramite sonar o telecamere e sono in grado di monitorare le missioni ambientali con un aliante dotato di sonde multi parametro. Il nostro veicolo MGB-300 può infine essere usato come gateway di entrata per comunicare per tutti i veicoli sommersi.
Oltre ai prodotti standard, Graal Tech ha lavorato in maniera attiva sin dal 2011 nell’ambito di ambiziosi programmi di Ricerca e Sviluppo per conto di centri di ricerca prestigiosi come il KACST, e aziende geofisiche internazionali come CGG e Seabed Geosolutions.
L’obiettivo finale di tutte queste iniziative è quello di realizzare strumenti innovativi capaci di rivoluzionare l’intero mercato delle ricerche sismiche con l’introduzione di nodi di acquisizione autonomi. I nostri ingegneri, insieme ai clienti, hanno infatti sviluppato nuovi concetti per quanto riguarda i robot sottomarini che sono dotati di sensori sismici e di sistemi per la registrazione dei dati e possono sostituire i mezzi di acquisizione convenzionali basati su streamer idrofoni trainati da costose imbarcazioni o nodi inferiori dispiegati e recuperati con procedimenti costosi e che richiedono tempi lunghi.
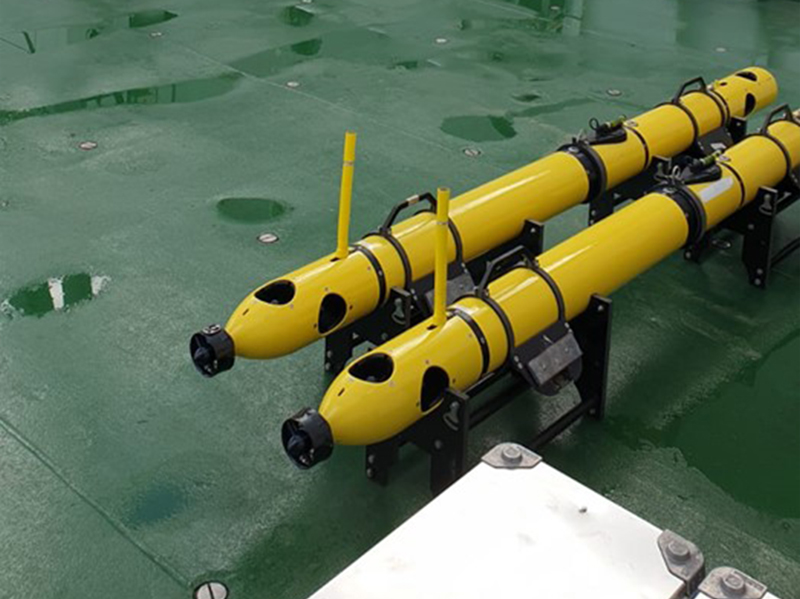
Le flotte di AUV sismici che sono state sviluppate possono o navigare nel volume dell’acqua mantenendo la formazione desiderata o navigare e arrivare sul fondale marino fino al punto di una griglia che è stata loro assegnata per raccogliere i dati relativi alle onde S che sono essenziali per una corretta mappatura del sottosuolo.





Difesa/Militare
Tutti i veicoli autonomi possono essere facilmente riconfigurati per eseguire varie operazioni di controllo e altre missioni di sorveglianza di interesse del settore della sicurezza.
Oltre ad utilizzare le piattaforme a nostra disposizione, lavoriamo a soluzioni innovative conducendo progetti nell’ambito del settore della ricerca e sviluppo in qualità di partner di importanti attori nel campo della difesa nazionale per ambienti marini e sottomarini.
Una delle collaborazione più proficue per Graal Tech è quella con il CSSN, il centro di sostegno e sperimentazione della Marina Italiana. Il centro possiede alcuni nostri AUV ed è costantemente alla ricerca di ulteriori strumenti che possano ulteriormente rafforzare e innovare le abilità di prova e valutazione nell’ambito dei conflitti sottomarini. Graal Tech si è inoltre impegnata a lavorare su una serie di tematiche diverse e ha partecipato a varie iniziative di ricerca.
Progetti
Fra i vari e più recenti progetti riguardanti tematiche non classificate possiamo annoverare i Progetti Nazionali per la Ricerca Militare o PNRM:
- DAMPS: inalizzato a progettare, modificare e valutare impiego di sensori programmabili e modulari per il monitoraggio acustico passivo mediante veicoli autonomi sottomarini
- HUNTERWATER: con lo scopo di realizzare un metodo innovativo per rilevazione e disinnesco di mine marine mediante l’utilizzo coordinato di veicoli robotici marini
- SPARTA: atto a realizzazione di un bersaglio artificiale per l’addestramento di sistemi ASW
Progetti europei finanziati
Graal Tech vanta una lunga lista di partecipazioni a progetti di ricerca europei finanziati dalla Commissione Europea relativi a varie tematiche come il monitoraggio ambientale, la cooperazione di squadre di robot marini e i manipolatori robotici sottomarini.
Grazie alla sua pluriennale esperienza, lo staff Graal Tech può fornire un contributo importante a nuove proposte di progetto, a partire dalla vera e propria genesi dello stesso, quando i ruoli dei vari partner devono ancora essere assegnati, una descrizione tecnica chiara e convincente deve ancora essere revisionata, un piano di sviluppo deve ancora essere disegnato e deve ancora essere formulato un budget appropriato per l’iniziativa.
Da un punto di vista tecnico, Graal Tech può condurre attività di ricerca in base ai bisogni o in autonomia o con una stretta collaborazione con altri partner e, se richiesto, può assumersi la leadership di specifici compiti o parti di lavoro.

Progetti
- MEPEMS – “Marine Electrical Power and Engine Management System” (2002-2005) finalizzato allo sviluppo di una rete di sensori distribuita per il monitoraggio e l’ottimizzazione delle performance dei motori marini
- HAB-Buoy – “In-situ imaging and recognition of Harmful Algal Bloom species by artificial neural network” (2003-2006) rivolto allo sviluppo di una rete di boe sensorizzate per il monitoraggio della qualità delle acque in un impianto di miticultura
- Hismar – “Hull Identification System for Marine Autonomous Robotics” (2005-2009)
finalizzato allo sviluppo di un robot autonomo per la pulizia delle chiglie delle navi - UAN – “Underwater Acoustic Network” (2008 – 2011) mirato allo sviluppo di una infrastruttura acustica che consentisse lo scambio di informazioni tra veicoli autonomi sottomarini eterogenei (partecipazione al progetto come subcontractor)
- CO3AUVs – “COoperative COgnitive COntrol for Autonomous Underwater Vehicles” (2009 – 2012) volto allo sviluppo di una squadra di veicoli autonomi sottomarini cooperanti per applicazioni di sorveglianza
- ARGOMARINE – “Automatic Oil-Spill Recognition and Geopositioning integrated in a Marine Monitoring Network” (2009-2012) finalizzato allo sviluppo di un veicolo autonomo equipaggiato con un “naso elettronico” capace di rivelare la presenza di idrocarburi dispersi sulla superficie del mare (partecipazione al progetto come subcontractor)
- TRIDENT – “Marine robots and dexterous manipulation for enabling autonomous underwater multipurpose intervention missions” (2010 – 2013) finalizzato allo sviluppo di un sistema robotico subacqueo autonomo capace di svolgere interventi di manipolazione sottomarina
- ROBOCADEMY – “European Academy for Marine and Underwater Robotics” (2014-2017) iniziativa Marie Curie rivolta alla formazione di giovani ricercatori su tematiche di robotica sottomarina
- WiMUST – “Widely scalable Mobile Underwater Sonar Technology” (2015-2018) finalizzato allo sviluppo di una squadra di veicoli autonomi subacquei equipaggiati con streamers di idrofoni per svolgere una survey sismica
- DexROV – “Dexterous ROV: effective dexterous ROV operations in presence of communication latencies” (2015-2018) teso allo sviluppo di un sistema di manipolazione sottomarina per ROV composto da due bracci e due mani robotiche antropomorfe da montare
- ROBUST – “Robotic Subsea Exploration Technologies” (2015-2020) volto allo sviluppo di un veicolo autonomo subacqueo equipaggiato con un manipolatore, in grado di svolgere ispezioni con una sonda LIBS per l’identificazione di rocce contenenti minerali d’interesse
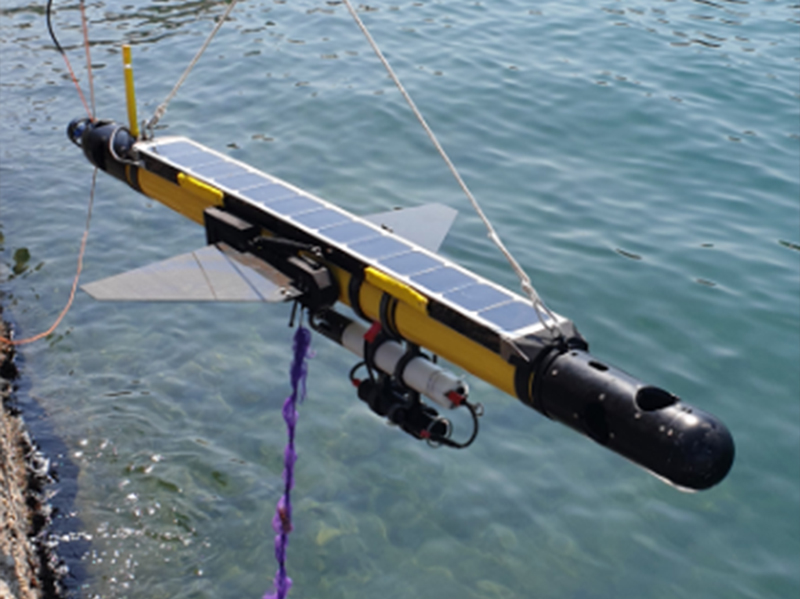
- ENDURUNS – “Development and demonstration of a long-endurance sea surveying autonomous unmanned vehicle with gliding capability powered by hydrogen fuel cell” (2018-2022) rivolto allo sviluppo di un veicolo autonomo subacqueo ibrido, capace di navigare anche come glider, per alte profondità (3000 metri)
- PULSAR – “Prototype for an Ultra Large Structure Assembly Robot” (2019-2021) teso allo sviluppo di un manipolatore subacqueo da utilizzare in piscina su un mock-up di un satellite per testare lil processo di assemblaggio dei pannelli di un telescopio spaziale.