our calling
Creating innovation is our mission
Research and Development are the key to our success and the core of our business.
On the one side, we continuously develop new concepts, theories, and methodologies, leading to the creation of innovative products.
On the other side, we provide a complete R&D support to our customers, helping any organization which cares about innovation to design and realize new advanced technological solutions, responding to specific operational demands in the maritime and underwater fields.
Turning an idea into a concrete business opportunity is a challenging process, that often requires the launch of a dedicated research project. Thanks to its multidisciplinary know how, and the long track record of R&D projects, Graal Tech can fully help the customer in all the aspects, by managing the technical risks, with reduced timing and costs.
Our experienced researchers can provide support during all the steps, from the transformation of the original idea into a solid research plan, through the execution of technical tasks and experimental activities, till the final validation at sea of the developed system.
This is the reason why today Graal Tech is a point of reference for R&D activities for many organizations operating in the maritime and underwater sector, including Multinational Corporations, Governmental Institutions, International Research Centres and Academies.
Oil and Gas
Within the Oil & Gas domain, our available products can be used for a wide range of operations: UMA arms, mounted on R-300 vehicles, can do maintenance activities on submerged infrastructures; AUVs of X-300 class, can perform, inspection surveys with sonars and cameras or environmental monitoring missions in glider mode with multiparameter probes; MGB-300 can be finally used as gateways nodes to communicate with all the immerged vehicles.
In addition to the standard products, Graal Tech has been also actively working since 2011 within ambitious R&D programs on behalf of of prestigious research centers, like KACST, and international geophysical companies, like CGG and Seabed Geosolutions.
The ultimate goal of the different initiatives is realizing innovative instruments capable to revolutionize the whole market of seismic surveys, with the introduction of autonomous mobile acquisition nodes. Our engineers, together with our customers, have indeed developed new concepts of underwater robots which are equipped with seismic sensors and data recorders and can replace conventional acquisition means, based on hydrophone streamers towed by costly vessels, or bottom nodes deployed and recovered with time-consuming procedures and tools.
The developed fleets of seismic AUVs can, either navigate in the water volume while maintaining the desired formation or navigate and land on the seabed at the points of an assigned grid to gather also S-waves data, essential for an accurate seismic 3D mapping of the subsoil.





Defense /Military
All our autonomous vehicles can be easily reconfigured for executing different patrolling tasks and other surveillance missions of interest in the Security sector.
In addition to the available platforms, Graal Tech is also frequently working on innovative solutions, by carrying out R&D projects, as a partner of important players of the National Defence domain for underwater and marine environments.
One of the more consolidated and fruitful cooperation is with CSSN, the centre for support and experimentation of the Italian Navy. The centre owns and operates some of our AUVs and is constantly looking for additional assets that could further innovate and strengthen the Test & Evaluation skills in the underwater warfare. During years, Graal Tech has been engaged to work on different topics and participated to various research initiatives.
Projects
Among the various projects, the more recent ones, dealing with not-classified themes are within the following PNRM (national projects for military research):
- DAMPS: aimed at planning, changing, and assessing programmable and modular sensors for passive acoustic monitoring through a team of cooperating AUVs
- HUNTERWATER: aimed at realizing an innovative methodology for detecting and deactivating marine mines through the coordinated use of marine robotic vehicles
- SPARTA: aimed at realizing an artificial target for training the system employed in the antisubmarine warfare
EU Funded Projects
Graal Tech has a long list of participations to research projects funded by the European Commission, related to various topics such as environmental monitoring, cooperating AUVs, underwater robotic manipulators.
Thanks to its pluriannual experience, today Graal Tech people can strongly contribute to a new project proposal, since its genesis, when the roles between partners have to be assigned, a clear and convincing technical description has to be edited, a development plan has to be drawn, and an adequate budget for the initiative has to be formulated.
From the technical point of view, depending on the needs, Graal Tech can carry out research activities either in autonomy, or with a close coordination with other partners, and, if required, by assuming the leadership of specific tasks or work packages.

Projects
- MEPEMS – “Marine Electrical Power and Engine Management System” (2002-2005) aimed at developing a network of sensors for monitoring and improving the performance of marine engines and power generators
- HAB-Buoy – “In-situ imaging and recognition of Harmful Algal Bloom species by artificial neural network” (2003-2006) aimed at developing a framework of sensorized buoys to monitor the quality of waters for aquacultures in coastal waters
- Hismar – “Hull Identification System for Marine Autonomous Robotics” (2005-2009)
aimed at developing an autonomoua robot to clean the keels of ships - UAN – “Underwater Acoustic Network” (2008 – 2011) aimed at developing an acoustic infrastructure to enable the exchange of information among autonomous underwater vehicles (participation as a subcontractor)
- CO3AUVs – “COoperative COgnitive COntrol for Autonomous Underwater Vehicles” (2009 – 2012) aimed at developing a team of autonomous underwater cooperating vehicles for surveillance purposes
- ARGOMARINE -“Automatic Oil-Spill Recognition and Geopositioning integrated in a Marine Monitoring Network” (2009-2012) aimed at developing an autonomous vehicle equipped with an electronic nose for detecting the presence of hydrocarbons on the sea surface (participation to the project as subcontractor)
- TRIDENT – “Marine robots and dexterous manipulation for enabling autonomous underwater multipurpose intervention missions” (2010 – 2013) aimed at developing a robotic system able to carry out underwater manipulation tasks
- ROBOCADEMY -“European Academy for Marine and Underwater Robotics” (2014-2017) a Marie Curie initiative aimed at training young researchers on underwater robotic topics
- WiMUST – “Widely scalable Mobile Underwater Sonar Technology” (2015-2018) developing a team of autonomous underwater vehicles equipped with streamers of hydrophones to carry out a seismic survey
- DexROV -“Dexterous ROV: effective dexterous ROV operations in presence of communication latencies” (2015-2018) aimed at developing a system of underwater manipulation for ROVs composed by two robotic arms and two robotic hands to be assembled
- ROBUST – “Robotic Subsea Exploration Technologies” (2015-2020) aimed at developing an autonomous underwater vehicle equipped with a manipulator able to carry out inspections with a LIBS probe to identify rocks containing minerals of interest
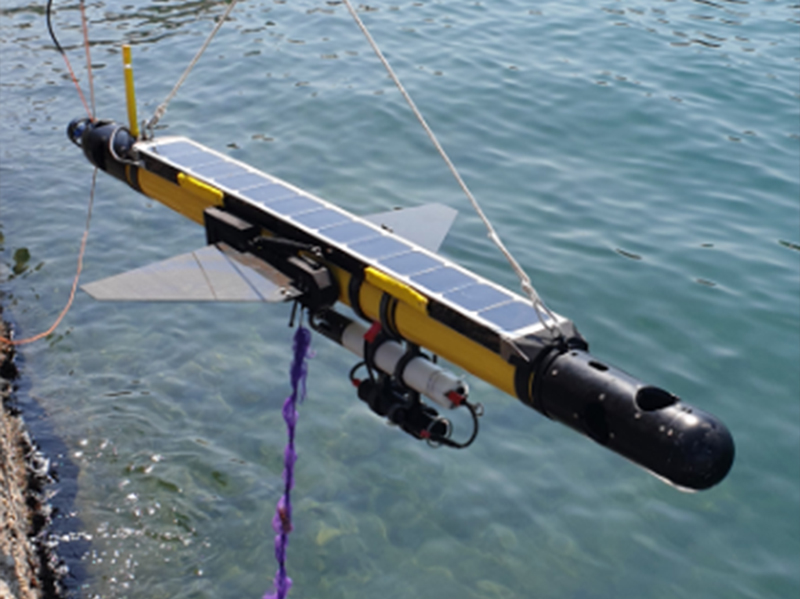
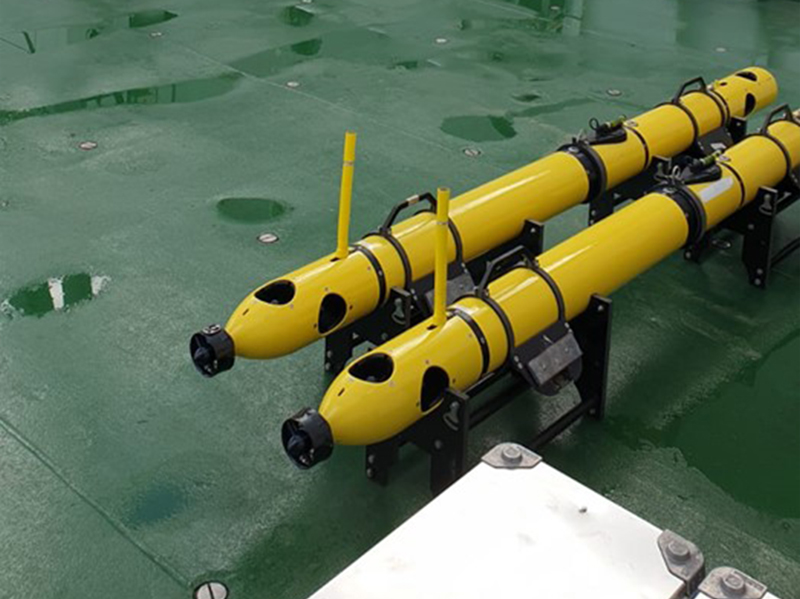
- ENDURUNS – “Development and demonstration of a long-endurance sea surveying autonomous unmanned vehicle with gliding capability powered by hydrogen fuel cell” (2018-2022) aimed at developing an hybrid AUV/glider system rated for 3000 metres depth
- PULSAR – “Prototype for an Ultra Large Structure Assembly Robot” (2019-2021) to be used in a pool on a satellite mock-up for testing the assembly process of the panels of a spatial telescope