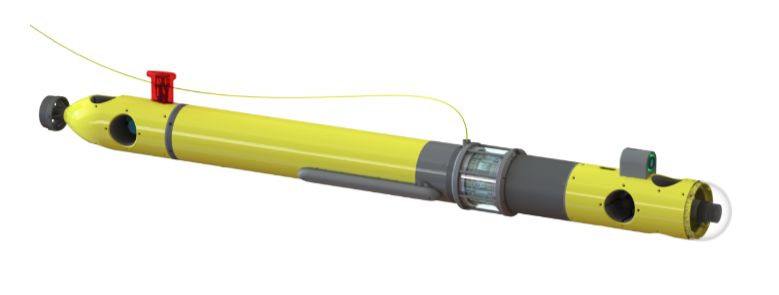
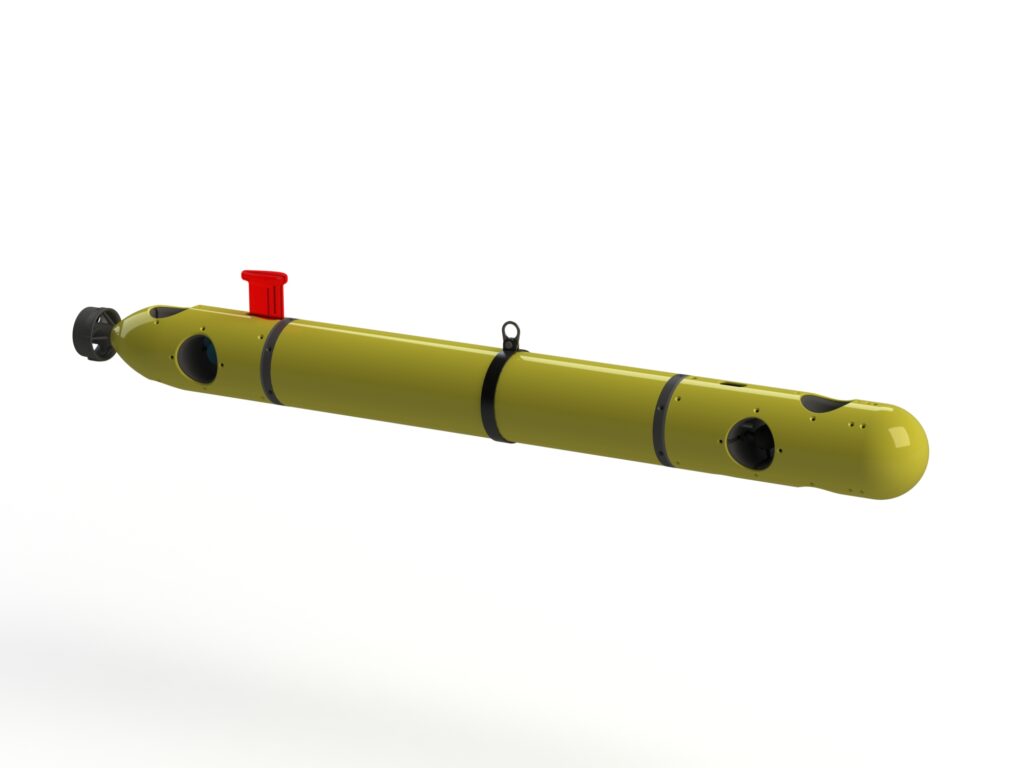
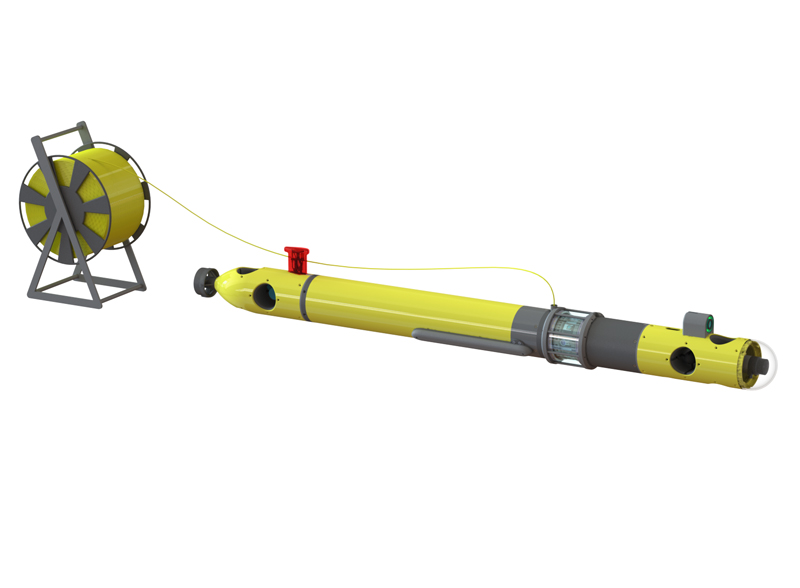
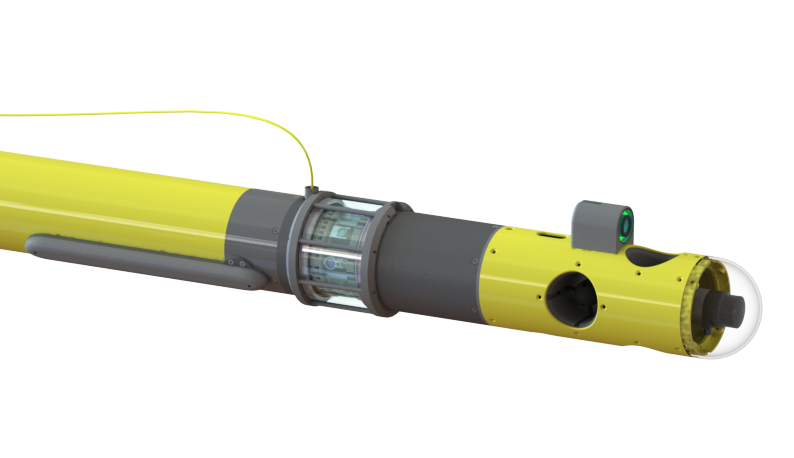
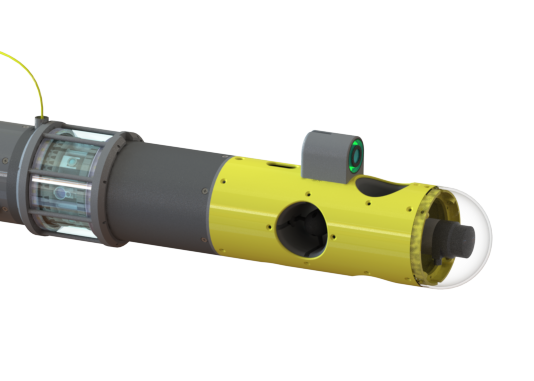
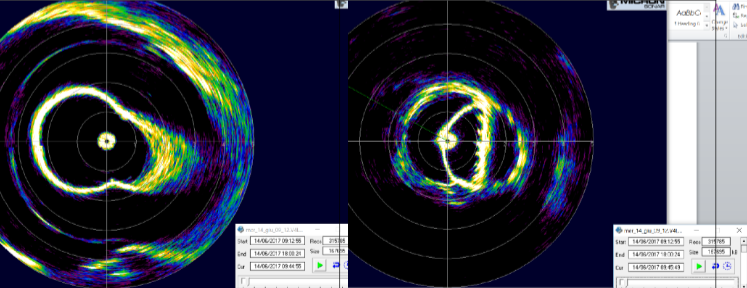
In its standard configuration, the vehicle is equipped with five cameras and one sonar. One camera is mounted on the vehicle nose, and looks forward, the other four are placed, in a crossed configuration, around the main axis of the vehicle, for getting a 360° view of the volume around the vehicle. The sonar is installed in the AUV front section and can be mounted, either in its nominal way, forward looking, or tilted by 90°, for having a 360° acoustic images of the AUV surroundings, which is very useful during the internal inspection of pipes or submerged tunnels. An additional side scan sonar is optionally available and can be mounted in the region behind the side cameras. Thanks to the presence of the fiber optic link, the user can analyse the acquired images in real-time. In this way, whenever something of interesting is detected, the user can, at any time, stop the mission execution in autonomous mode and switch to manual control, for driving the vehicle to the point of interest deserving a closer look.