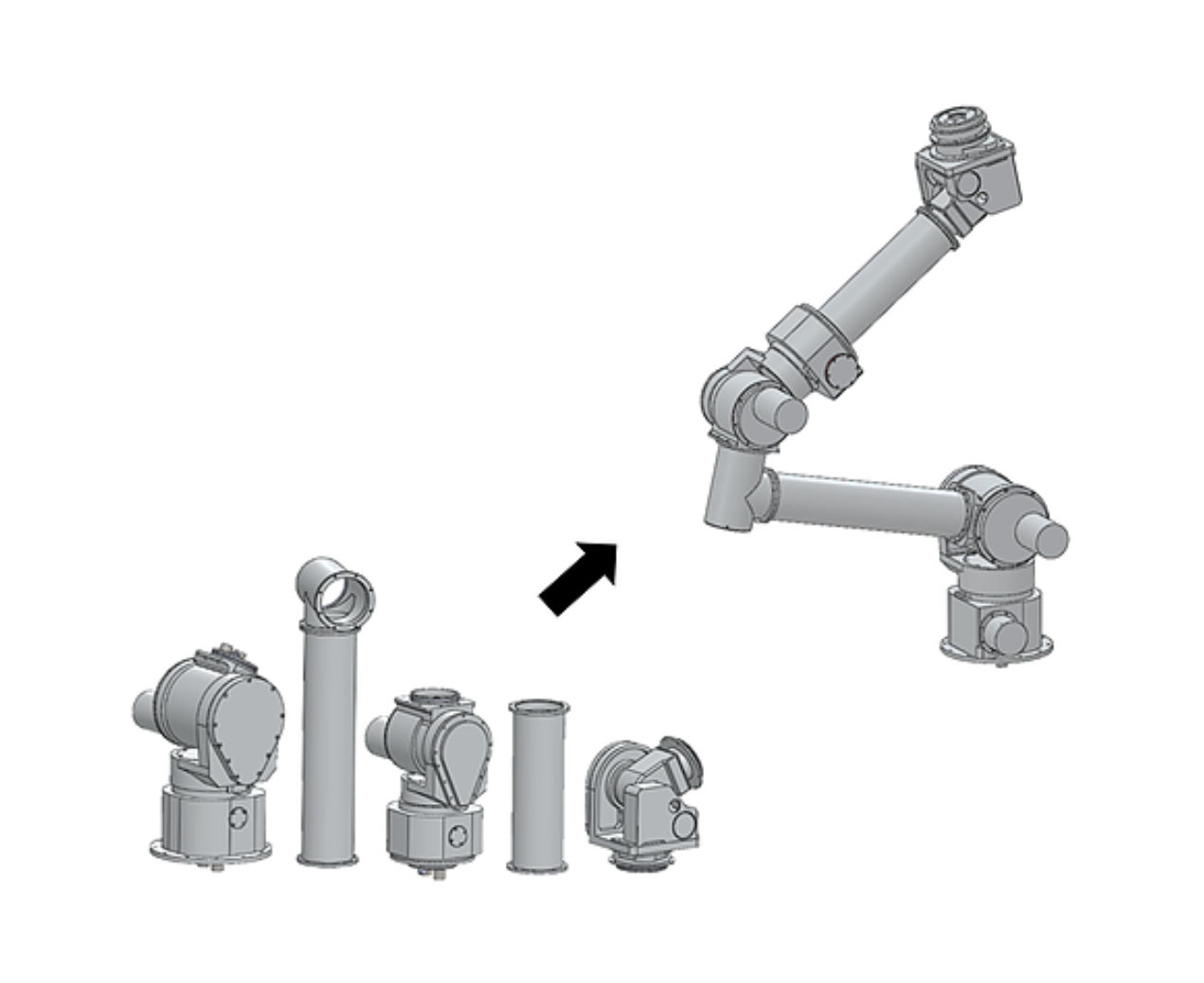
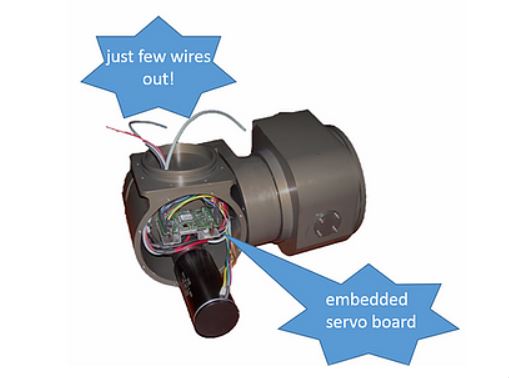
The presence of an embedded distributed architecture, other than reducing the cabling issues, strongly simplifies the integration of modules, as it allows standardized mechatronic interfaces.
On the two terminating flanges of every joint, just two electrical connectors are used for establishing power and data links with all the other joints, through electrical cables running inside the links.
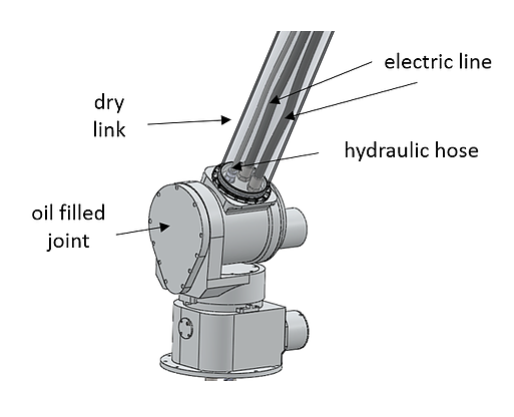
A third connector is also present for connecting all the joints through hydraulic hoses and establishing a global hydraulic circuit, running from the base to the wrist of the manipulator. In this way, whenever the considered application requires a strong depth compliance, all the joints can be easily filled by oil, while maintaining the links dry and without dismounting the robot.
Also the integration of the manipulator with a supporting vehicle results extremely simplified, as it can be operated by simply connecting the two electrical connectors located at the base of the robot, to a power source and to a computer with a CAN interface, and the hydraulic connector to a pressure compensator.