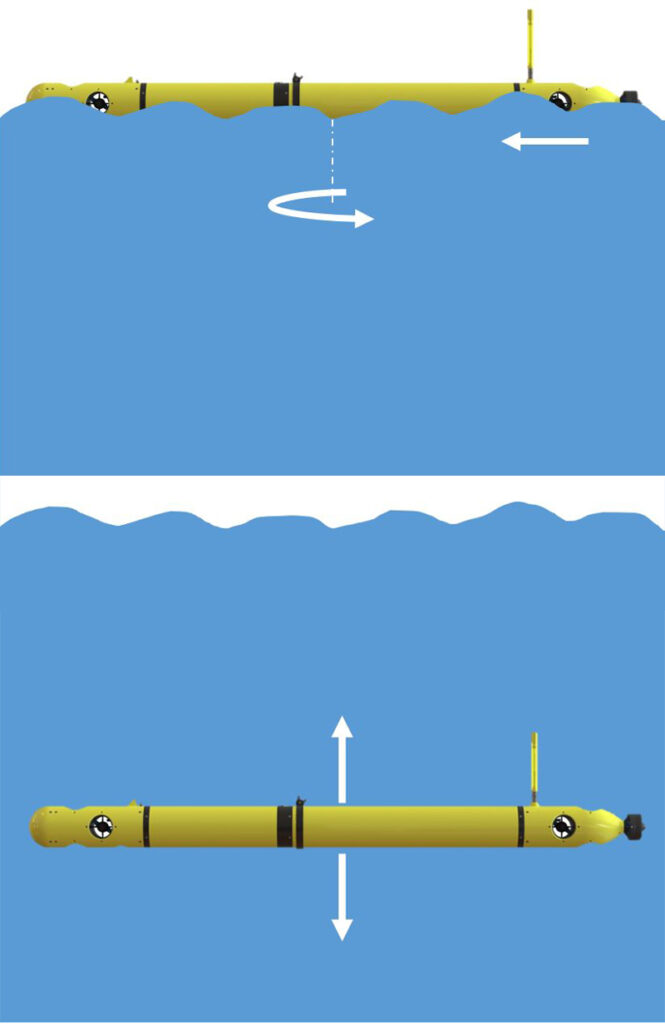
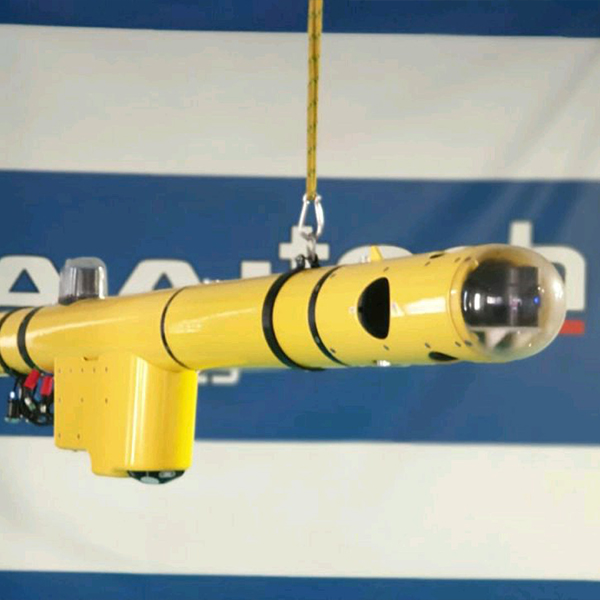
One of the main features of X-300 is its high maneuverability, obtained without any moving control surfaces. The motion in the surge direction is produced by 1 bi-directional rear thruster. Steering motions, in both vertical and horizontal planes, are instead made possible by 2 pairs of additional bi-directional thrusters placed, in crossed configurations, at the vehicle bow and stern.
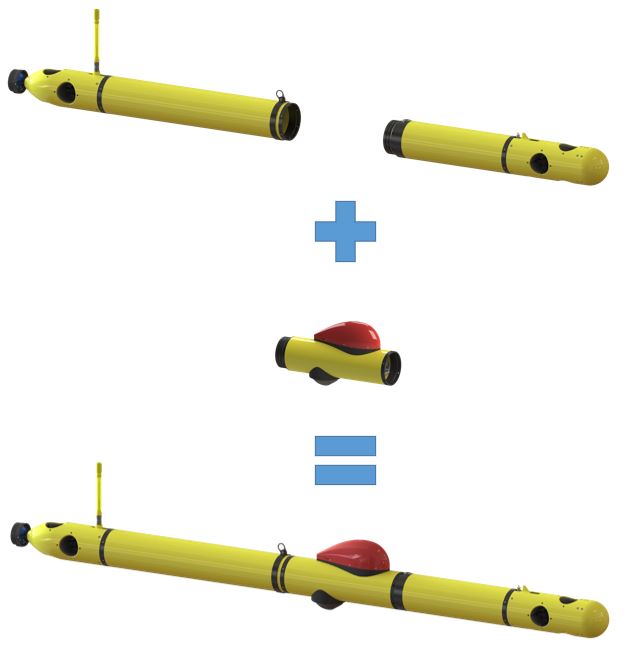
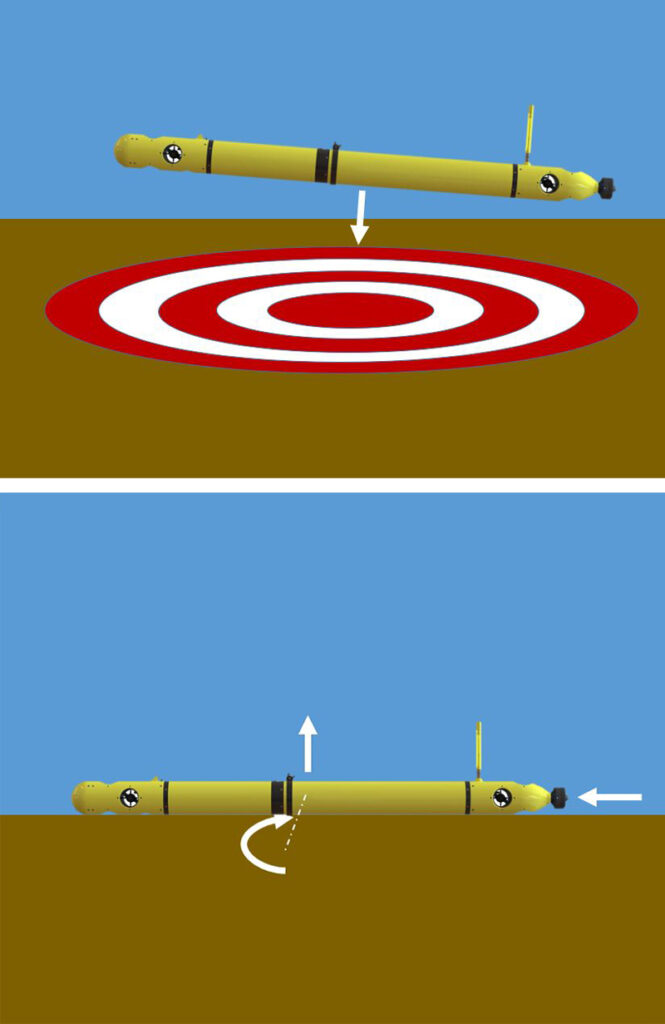
Conventional torpedo-shaped AUVs can execute maneuvres only above certain speeds, as the steering action is produced by the hydrodynamic lift given by thrusters and control surfaces. On the contrary X-300, can rotate around its center even when the rear thruster is off and can translate, either horizontally or vertically. In addition the vehicle can also change its buoyancy, thanks to the presence of a ballast chamber in which water can be injected or ejected, and can control its hydrostatical equilibrium attitude through the internal displacement of the battery pack.
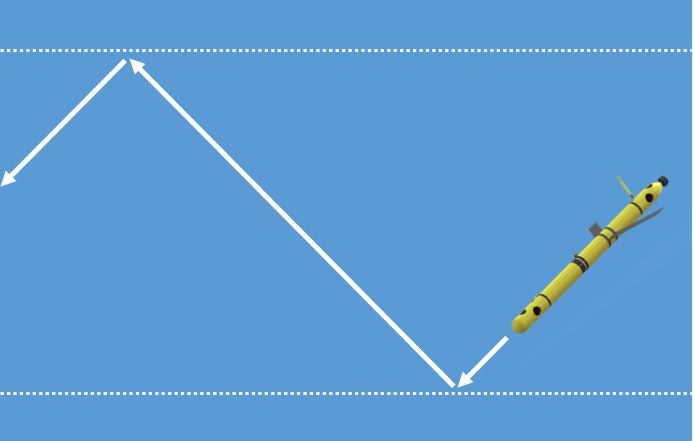
The combined use of buoyancy and attitude controls further enriches the vehicle motion possibilities, actually making X-300 a hybrid vehicle with the motion capabilities of standard self-propelled AUVs, remotely operated vehicles (ROVs), and even low-power consuming oceanographic gliders.