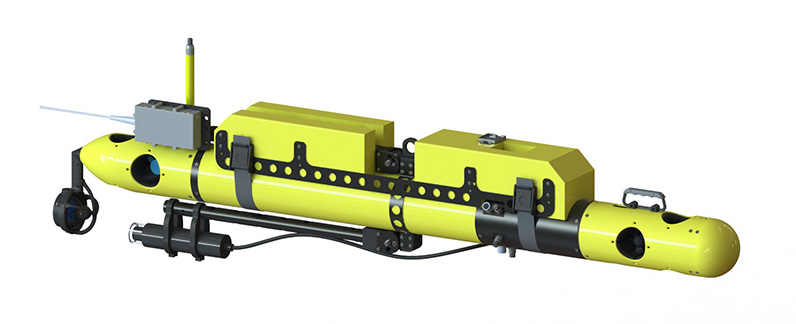
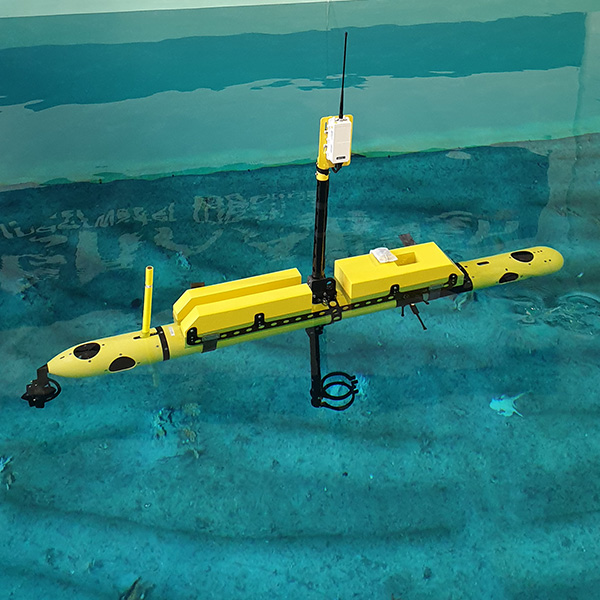
MGB-300 is the newest Graal Tech autonomous vehicle belonging to the X-300 family. It is an Unmanned Surface Vehicles (USV), equipped with a long-range radio device and an underwater acoustic modem. When used in combination with one or more X-300 AUVs can act as a data gateway between the underwater vehicles and the control station. Like its parent X-300, MGB-300 is characterized by high manoeuvrability, flexible payload modularity, and open control system, making it a unique and versatile platform that can comply with many different mission needs.