The sea is the best simulator we can use
Unfortunately testing robots at sea is very expensive and time-consuming and it is often difficult to fully understand what is really going on underwater.
We are used to overcome this issue by reducing to the minimum our sea trips, by preliminarily doing as much as possible of the job at office, with powerful software tools for modelling the robots and simulating their behaviour in a virtual environment.
Our pluriannual experience in dynamic modelling and simulation is today offered to our clients through a complete suite of services for studying and characterizing the dynamic parameters of unmanned underwater vehicles and verifying the performance of control and navigation before going at sea.

Hydrodynamic Modelling
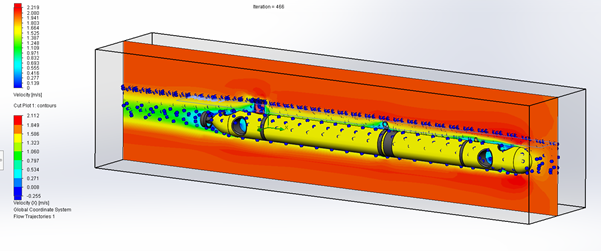
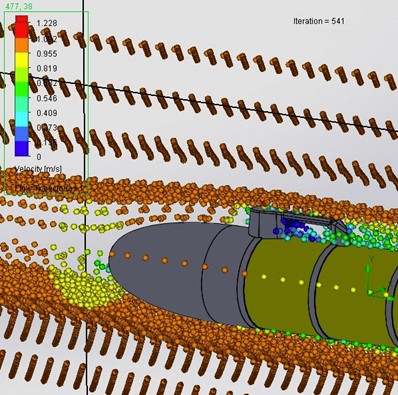
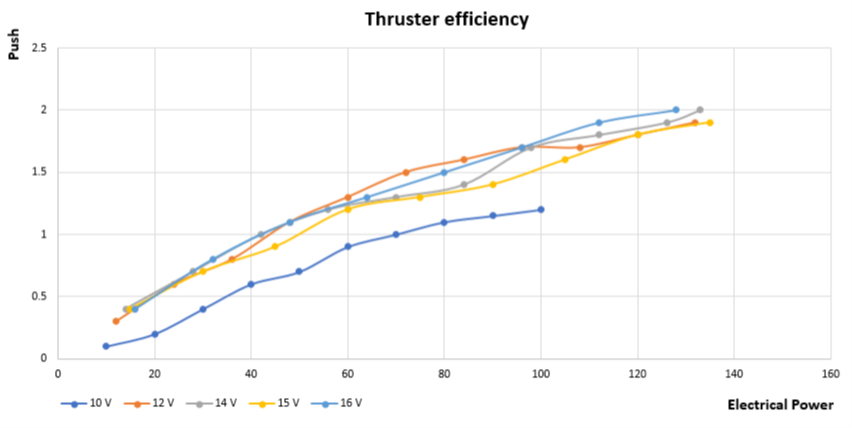
Graal Tech can support customers who want to get a mathematical model of an underwater vehicle or to characterize the pushing force of thrusters or other hydrodynamic parameters of mobile bodies in water. Our expert mechanical engineers can run CFD-based simulations with modern CAD tools and provide preliminary estimations of the main coefficients of interest for different incidence angles and relative flow speeds. Experimental confirmations can then be obtained with dedicated tests in our pool, with the auxilium of an available sensorized platform and a flow generator, currently under installation. The platform is equipped with a 6-axis underwater force sensor that allows to measure the dynamic actions generated by the attached actuators or mechatronic systems. When in function, the flow generator will also enable the dynamic characterization of the polar plots of drag and lift coefficients of real underwater vehicles or scaled-down mock-ups.
Dynamic Simulations
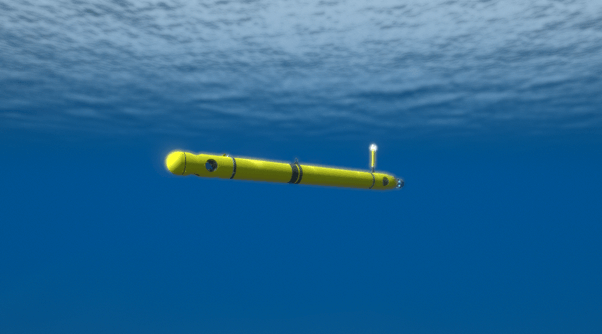
Our control engineers can help customers in preparing and running at office virtual experiments with dynamic models of autonomous vehicles moving in 3D synthetic environments.
This service is aimed at researchers that need to validate innovative guidance, navigation, and control algorithms, or to test complex missions involving cooperation among multiple vehicles or requiring sensor-driven behaviours.
Our virtual solutions allow to focus on the experiment of interest, without coping with all the logistic aspects of a sea trial. By identifying and de-bugging major problems at home, an important saving of money is obtained, for the reduced time of means and people at sea.
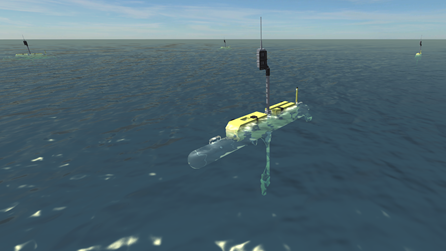
Our synthetic underwater world can be populated, not just with mobile robots, but also with many other different units, including sensing stations, communication devices, localization systems and other customized objects of interest. All the mathematical models underlying the virtual objects and the main environmental characteristics can be implemented with different levels of accuracy and complexity, depending on the needs of the customer application.
The available 3D rendering graphics with multiple camera views provides a thorough understanding of the scene and allows to appreciate the outcomes of the ongoing experiment.